
Multi-agent planning for blended human-robot environments faces important challenges. Present methodologies, usually counting on data-driven human movement prediction and hand-tuned prices, battle with long-term reasoning and sophisticated interactions. Researchers intention to resolve two major points: growing human-compatible methods with out clear equilibrium ideas and producing adequate samples for studying algorithms. Current approaches, whereas efficient in scaling real-world autonomy, falter in uncommon, complicated situations. The divergence between methods utilized in zero-sum video games and sensible robotic programs highlights the necessity for modern options that may bridge this hole and enhance multi-agent planning in human-robot settings.
Current approaches to multi-agent planning in blended human-robot environments embody varied frameworks and simulators. Open-source platforms like JaxMARL, Jumanji, and VMAS provide hardware-accelerated environments for totally cooperative or aggressive duties. GPUDrive, constructed on Madrona, offers a mixed-motive setting with GPU acceleration, supporting quite a few brokers throughout numerous situations and together with human demonstrations.
In autonomous driving, simulators like MetaDrive, nuPlan, Nocturne, and Waymax make the most of real-world knowledge. GPUDrive focuses on behavioral and management points, providing GPU acceleration, varied sensor modalities, and in depth scalability. Simulators usually function baseline brokers equivalent to car-following fashions, rule-based brokers, and recorded human driving logs. Some incorporate learning-based brokers utilizing reinforcement studying. GPUDrive combines human driving logs with high-performing reinforcement studying brokers, making a complete setting for learning multi-agent studying in autonomous driving situations.
Researchers from New York College and Stanford College launched GPUDrive, an modern simulator designed to beat the challenges in multi-agent studying for self-driving planners. It combines real-world driving knowledge with high-speed simulation capabilities, enabling the applying of sample-inefficient however efficient reinforcement studying algorithms to planner design. Operating at over 1,000,000 steps per second on each consumer-grade and datacenter-class GPUs, GPUDrive helps a whole lot to 1000’s of simultaneous worlds with a whole lot of brokers per world. The simulator provides quite a lot of sensor modalities, together with LIDAR and human-like view cones, permitting researchers to review the consequences of various sensor varieties on agent traits. GPUDrive’s potential to include driving logs and maps from current self-driving datasets facilitates the combination of imitation studying instruments with reinforcement studying algorithms.
GPUDrive’s simulation design addresses the challenges of producing billions of setting samples for multi-agent studying in self-driving situations. Constructed on the Madrona framework, it provides high-throughput reinforcement studying environments with parallel execution of a number of unbiased worlds on accelerators. This simulator tackles particular challenges in driving simulation by means of a number of technical improvements. It makes use of a Bounding Quantity Hierarchy (BVH) to effectively monitor physics entities and scale back collision checks. A polyline decimation algorithm is utilized to simplify street geometry, considerably lowering reminiscence utilization and bettering step occasions. Additionally, it helps varied remark areas, together with a radius-based remark, LIDAR scans, and a human-like view cone. It makes use of the Waymo Open Movement Dataset, representing maps as polylines and together with skilled human driving demonstrations. Agent dynamics are modeled utilizing each Ackermann and simplified bicycle fashions, permitting for various automobile traits and invertibility for imitation studying.
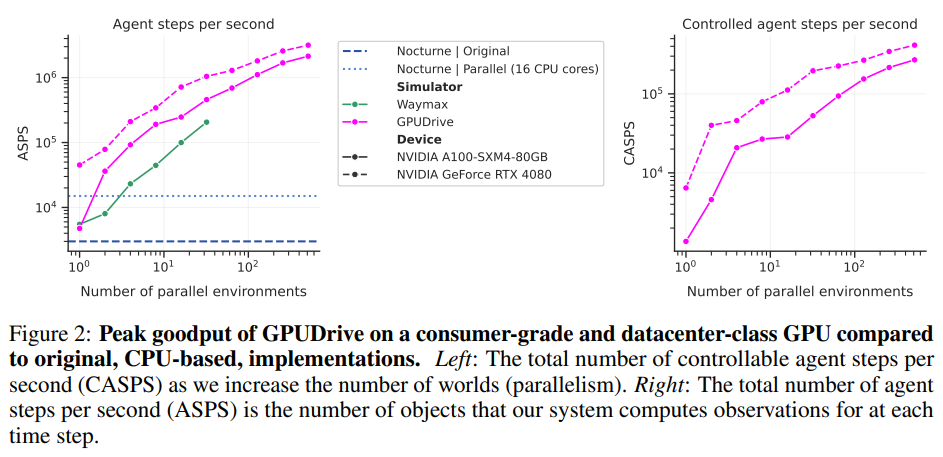
GPUDrive demonstrates distinctive efficiency in simulation velocity and reinforcement studying. It achieves over 1,000,000 Agent Steps Per Second on consumer-grade GPUs, considerably outperforming CPU-based implementations. The simulator offers a 25-40x coaching speedup in comparison with Nocturne, fixing situations in minutes as an alternative of hours. GPUDrive’s scalability is obvious because it improves pattern effectivity with bigger datasets, taking solely 15 seconds per state of affairs when coaching on 1024 distinctive situations. This efficiency allows efficient utilization of huge datasets just like the Waymo Open Movement Dataset, even with restricted computational assets, probably accelerating multi-agent studying analysis in autonomous driving.

This analysis introduces GPUDrive, an modern GPU-accelerated simulator designed to generate the huge quantity of knowledge wanted for efficient reinforcement studying in multi-agent driving situations. By using the Madrona Engine, it achieves outstanding throughput, processing tens of millions of steps per second throughout a whole lot of worlds and brokers. This effectivity dramatically reduces coaching time, permitting for scenario-solving in minutes and even seconds when amortized. Whereas It represents a major development in scaling reinforcement studying for multi-agent planning in autonomous driving, the researchers acknowledge remaining challenges, together with optimizing hyperparameters, addressing reset name impacts, and attaining human-level driving efficiency throughout all situations.
Try the Paper and GitHub. All credit score for this analysis goes to the researchers of this venture. Additionally, don’t overlook to comply with us on Twitter and be a part of our Telegram Channel and LinkedIn Group. Should you like our work, you’ll love our publication..
Don’t Neglect to hitch our 48k+ ML SubReddit
Discover Upcoming AI Webinars right here
Asjad is an intern advisor at Marktechpost. He’s persuing B.Tech in mechanical engineering on the Indian Institute of Expertise, Kharagpur. Asjad is a Machine studying and deep studying fanatic who’s at all times researching the purposes of machine studying in healthcare.



