
Quite a few challenges underlying human-robot interplay exist. One such problem is enabling robots to show human-like expressive behaviors. Conventional rule-based strategies want extra scalability in new social contexts, whereas the necessity for in depth, particular datasets limits data-driven approaches. This limitation turns into pronounced because the number of social interactions a robotic may encounter will increase, creating a requirement for extra adaptable, context-sensitive options in robotic conduct programming.
Analysis in producing socially acceptable robotic and digital human behaviors encompasses rule-based, template-based, and data-driven strategies. Rule-based approaches depend on formalized guidelines however want expressivity and multimodal capabilities. Template-based strategies derive interplay patterns from human traces but additionally undergo from restricted expressivity. Knowledge-driven fashions, using machine studying or generative fashions, are restricted by information inefficiency and the necessity for specialised datasets. Giant Language Fashions (LLMs) have proven promise in robotics for duties like planning and reacting to suggestions, enabling social reasoning and consumer choice inference.
Researchers at Google Deepmind and the College of Toronto have proposed Generative Categorical Movement (GenEM), specializing in producing expressive robotic behaviors utilizing LLMs. The GenEM strategy leverages the wealthy social context accessible from LLMs to create adaptable and composable graphic robotic movement. It makes use of a few-shot chain-of-thought prompting to translate human language directions into parameterized management code utilizing the robotic’s accessible and discovered expertise.
The behaviors are generated in a number of steps, ranging from consumer directions and ending with code for the robotic to execute. Two consumer research had been thought-about to judge the strategy, evaluating the generated behaviors to these created by an expert animator. The strategy outperforms conventional rule-based and data-driven approaches, offering higher expressivity and flexibility in robotic conduct. Researchers additionally utilized consumer suggestions to replace the robotic’s coverage parameters and generate new expressive behaviors by composing current ones.
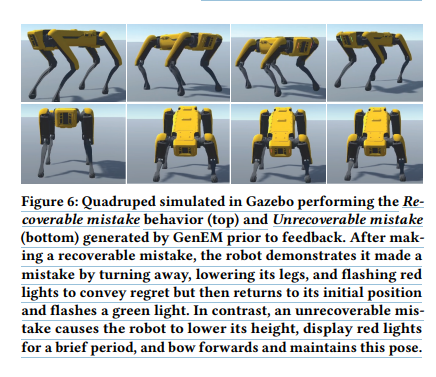
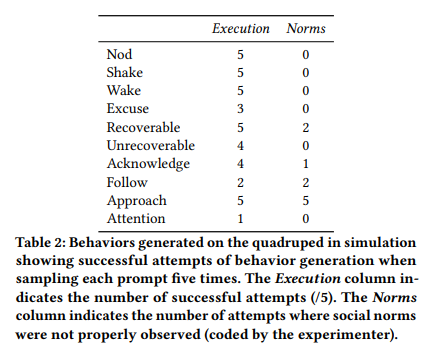
The 2 consumer research reveal GenEM’s effectiveness, displaying that the generated behaviors are perceived as competent and comprehensible. Simulation experiments had been performed utilizing a cellular robotic and a simulated quadruped, indicating that the strategy carried out higher than a model the place language directions had been instantly translated into code. It additionally allowed for the technology of behaviors agnostic to embodiment and composable.
In conclusion, the analysis on GenEM utilizing LLMs marks a big development in robotics, demonstrating the flexibility to generate expressive, adaptable, and composable robotic behaviors autonomously. This strategy showcases the potential of LLMs in robotics, emphasizing their function in facilitating efficient human-robot interactions by the autonomous technology of expressive behaviors.
Take a look at the Paper and Mission Web page. All credit score for this analysis goes to the researchers of this undertaking. Additionally, don’t neglect to comply with us on Twitter and Google Information. Be a part of our 36k+ ML SubReddit, 41k+ Fb Neighborhood, Discord Channel, and LinkedIn Group.
If you happen to like our work, you’ll love our e-newsletter..
Don’t Neglect to affix our Telegram Channel
Nikhil is an intern advisor at Marktechpost. He’s pursuing an built-in twin diploma in Supplies on the Indian Institute of Know-how, Kharagpur. Nikhil is an AI/ML fanatic who’s all the time researching purposes in fields like biomaterials and biomedical science. With a powerful background in Materials Science, he’s exploring new developments and creating alternatives to contribute.


