
Robotic process execution in open-world environments presents vital challenges because of the huge state-action areas and the dynamic nature of unstructured settings. Conventional robots battle with surprising objects, various environments, and process ambiguities. Present techniques, typically designed for managed or pre-scanned environments, lack the adaptability required to reply successfully to real-time modifications or unfamiliar duties. These limitations spotlight the pressing want for extra versatile, scalable approaches to allow robots to deal with advanced, long-horizon duties utilizing pure language instructions. A vital problem is making certain strong, real-time decision-making and error restoration, that are important for reaching dependable process completion in numerous, unstructured environments.
Present robotic techniques for process planning sometimes make the most of strategies like finite state machines, domain-specific languages (e.g., PDDL), or reinforcement studying fashions. These strategies, whereas efficient in constrained eventualities, are restricted by their reliance on structured environments and vital quantities of knowledge. Hierarchical and imitation studying strategies provide alternate options however are sometimes hindered by their computational complexity and the necessity for intensive coaching datasets. These approaches additionally face scalability points, struggling to adapt when launched to new, unpredictable environments. The first limitation of those strategies is their fragility and incapacity to recuperate from errors dynamically, making them unsuitable for real-time functions in extremely variable environments like houses or industrial websites.
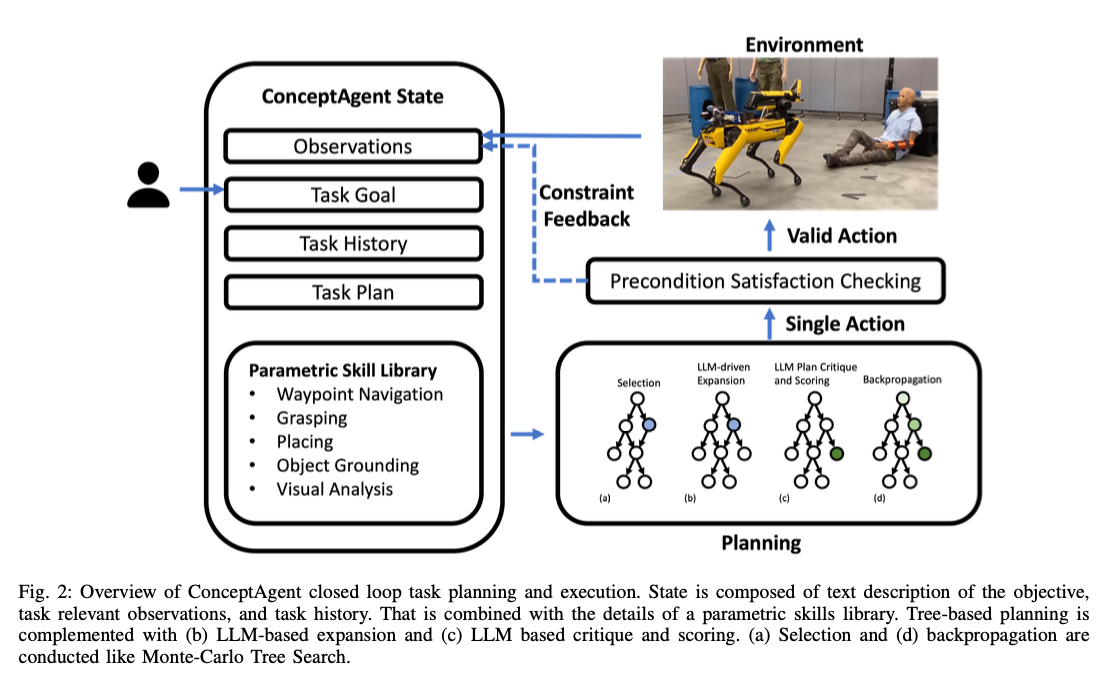
Researchers from MIT, JHU, and DEVCOM ARL have launched ConceptAgent, an AI system designed to enhance process planning and execution in unstructured environments. ConceptAgent incorporates two key improvements:
- Predicate Grounding: A proper technique that verifies the feasibility of an motion earlier than execution by checking preconditions, stopping infeasible actions, and enabling failure restoration.
- LLM-Guided Monte Carlo Tree Search (LLM-MCTS): This strategy enriches conventional tree search with dynamic self-reflection, permitting the robotic to discover a number of future states and refine its plans effectively. By leveraging the reasoning energy of LLMs, ConceptAgent can dynamically generate and alter process plans, making certain efficient process completion in massive and complicated environments.
These improvements considerably enhance the system’s skill to deal with real-time decision-making, making it extra adaptable and scalable than present strategies.
ConceptAgent operates inside simulation environments corresponding to AI2Thor and real-world setups involving robotic platforms like Spot. It leverages LLMs to boost conventional Monte Carlo Tree Search with dynamic, self-reflective planning. The system’s core performance revolves round 3D scene graphs, which give real-time abstractions of the robotic’s environment. These scene graphs are aligned with pure language directions, permitting ConceptAgent to interpret and react to task-specific instructions extra successfully.
For experimental validation, the researchers employed a dataset of 30 simulated object rearrangement duties in kitchen environments, supplemented by 40 further duties categorized as reasonable and arduous. These duties take a look at the agent’s skill to deal with rising complexity, together with hidden objects and ambiguous process descriptions. The outcomes have been additional bolstered by real-world trials, the place the ConceptAgent-guided Spot robotic carried out cellular manipulation duties in randomized, low-clutter environments.
ConceptAgent confirmed a notable enchancment in process efficiency throughout each simulated and real-world environments. Within the simulation, it achieved a process completion fee of 19% for easy-level object rearrangement duties, considerably outperforming baseline fashions like ReAct and Tree of Ideas, which had completion charges of round 8-10%. Moreover, in reasonable and arduous duties, ConceptAgent demonstrated a 20% enhance in process success because of the integration of precondition grounding and LLM-MCTS, confirming the efficacy of those elements. In real-world trials, the place a Spot robotic was examined in randomized, low-clutter environments, ConceptAgent efficiently accomplished 40% of duties, highlighting its robust efficiency in cellular manipulation duties. The system’s general outcomes underscore its enhanced planning effectivity, adaptability, and skill to recuperate from errors, making it a strong resolution for advanced, open-world robotic functions.

In conclusion, ConceptAgent supplies a sophisticated resolution to the persistent challenges of process planning and execution in open-world environments. By integrating predicate grounding and LLM-guided tree search, the system enhances adaptability, enabling robots to carry out duties in dynamic, unpredictable settings. These contributions are pivotal for advancing the sector of robotics, as they deal with key limitations of present approaches and pave the way in which for extra versatile, error-tolerant process execution techniques. ConceptAgent’s demonstrated success in each simulated and real-world trials highlights its potential for huge utility in domains corresponding to house automation, healthcare, and industrial robotics.
Take a look at the Paper. All credit score for this analysis goes to the researchers of this mission. Additionally, don’t overlook to observe us on Twitter and be a part of our Telegram Channel and LinkedIn Group. For those who like our work, you’ll love our e-newsletter.. Don’t Neglect to hitch our 50k+ ML SubReddit
[Upcoming Event- Oct 17 202] RetrieveX – The GenAI Information Retrieval Convention (Promoted)
Aswin AK is a consulting intern at MarkTechPost. He’s pursuing his Twin Diploma on the Indian Institute of Expertise, Kharagpur. He’s captivated with information science and machine studying, bringing a robust tutorial background and hands-on expertise in fixing real-life cross-domain challenges.


